Description
OVERVIEW
FEATURES
SPECIFICATIONS
DOWNLOAD
INSTRUCTION
OVERVIEW
The FrSky Pilot series flight controller is an All-in-One module that supports comprehensive flight control functions with pre-installed powerful INAV (The support of other open-source software like Ardupilot and Betaflight are ongoing.) and F.Port 2.0 software. This control system is targeted towards RC hobby enthusiasts who are looking for a complete system combining power management, a powerful graphic FrSky OSD, and plenty of IOs.
The R9/RXSR Pilot is comprised of a three-layer stack:
- A mainboard providing power for servos and for a video system with switchable voltages, current measurement and general connectivity (6 full UARTs, I²C, 12 servo/motor outputs, 2 analog inputs, video input/output)
- A processing board using a powerful STM32F765 at its core, boasting 1MB of flash memory, and 512KB of RAM capable of running the INAV, Ardupilot and Betaflight flight control software. It integrates an ICM20602 IMU, FrSky’s latest graphic FrSky OSD, and an SPL06 high precision barometer. An SPI bus connector allows for optional connection of a second vibration isolated IMU, which can be mounted to the board, or other peripherals. An SD card slot allows for data storage including BlackBox logging. It also includes a piezo audio transducer for system notifications and lost model locating.

- Any FrSky receivers with a standard FPC interface can be connected directly to the processing board (RXSR-FC / R9MM-FC-OTA). All F.Port 2.0 Capable Receivers (Archer and Tandem Series Receivers, etc.), SBUS receivers, and some others with serial ports are also compatible.

FEATURES
- Supports FrSky F.Port 2.0 Protocol
- 12 Servo/Motor Outputs & Multiple Serial Ports (6 UARTs, I²C, SPI)
- Powerful STM32F765 Based Flight Controller is capable Running on INAV / Ardupilot / Betaflight Firmware
- Built-in Graphic FrSky OSD
- Supports FrSky S.Port Sensors
- Built-in Multiple Sensors
- Max 150A Capable Hall-effect Current Sensor
- Built-in 3-axis Gyroscope & 3-axis Accelerometer Sensor (ICM20602IMU, ±2000dps, ±16g)
- Supports ICM20601/ICM20602/MPU6000 IMU as external gyroscope module with vibration insulated box
- Built-in Barometer sensor(SPL06-001)
- Adjustable Voltage Output through integrated BEC function
- Supports Black Box Data Record Function(via SD card)
- Compatible Receiver
- Standard FPC Interface on-board receiver with a perfect fit protection box (RXSR-FC/R9MM-FC-OTA, etc.)
- All F.Port 2.0 Capable Receivers (Archer and Tandem Series Receivers, etc.)
- SBUS Receivers and Some Others with Serial Ports
SPECIFICATIONS
- Dimension: 60*45*14mm (L*W*H)
- Weight: 35g (Without connector)
- Mounting(FC): 30.5*30.5mm with M3 grommets
- Mounting(Rx): 13*13mm (R9MM-FC-OTA / RXSR-FC)
- Battery Port: XT60 Plug
- MCU: STM32F765VG (1MB Flash Memory, 512KB RAM)
- IMU: ICM20602 (±2000dps, ±16g)
- Barometer: SPL06-001
- Graphic OSD: FrSky OSD
- Micro SD Slot
- 12* PWM Outputs
- 6* Full UARTs (Any UART can be configured to the S.Port via INAV)
- 1* I2C
- 2* Analog Inputs (0-3.3V)
- 1* Video Input
- 1* Video Output
- 1* Piezo Audio Transducer
- 2* ESC Power Pads
- Voltage Range: DC 11.1V~51V (3S~12S Li-Po/Li-ion)
- Current Sensor: Max 150A
- BECs:
BEC Default (V) Selectable Voltages
(adjustable with jumper) (V)Continuous Current (A) Max. Current (A) 3.3V 3.3 3.3 0.5 0.5 5V 5 5 1 2 VS(Servos) 5 5/6/7.2/8.16* 5 6 Vv(Video) 5 5/9 2 2.2 * Note: If you need VS 8.16V, you need to jump both VS-7.2V and VS-6V.
DOWNLOAD
INSTRUCTION
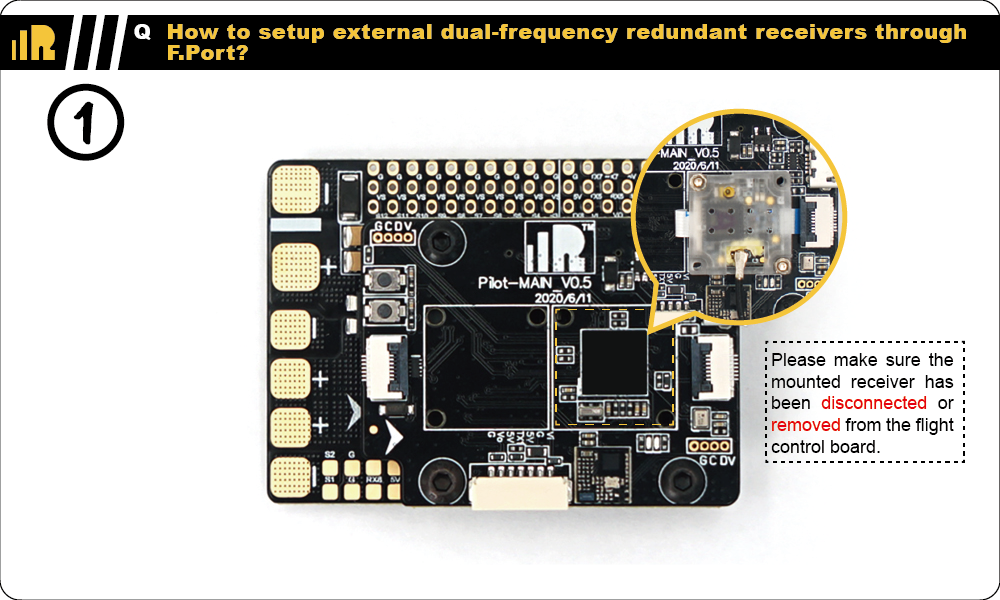
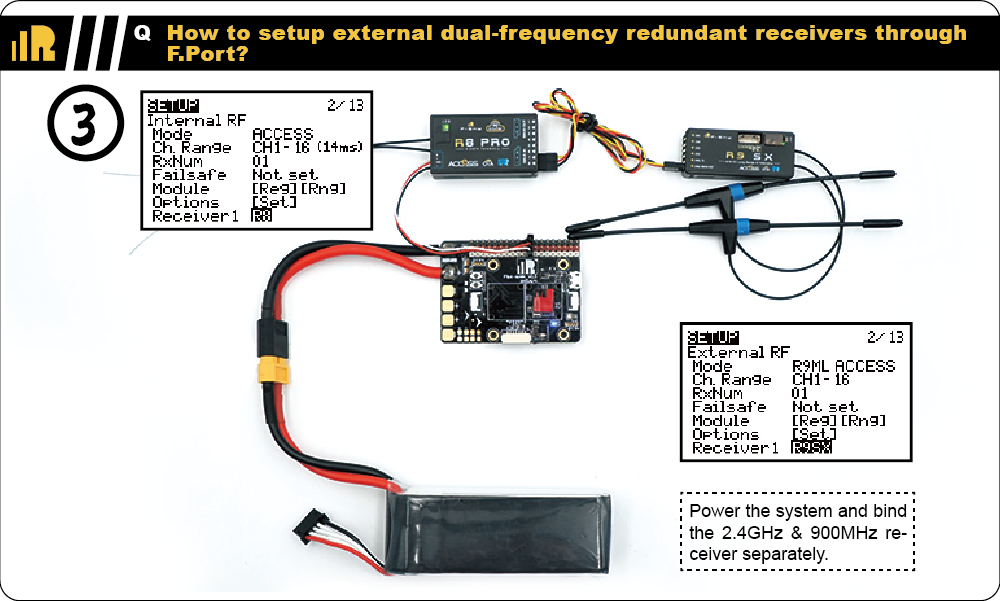
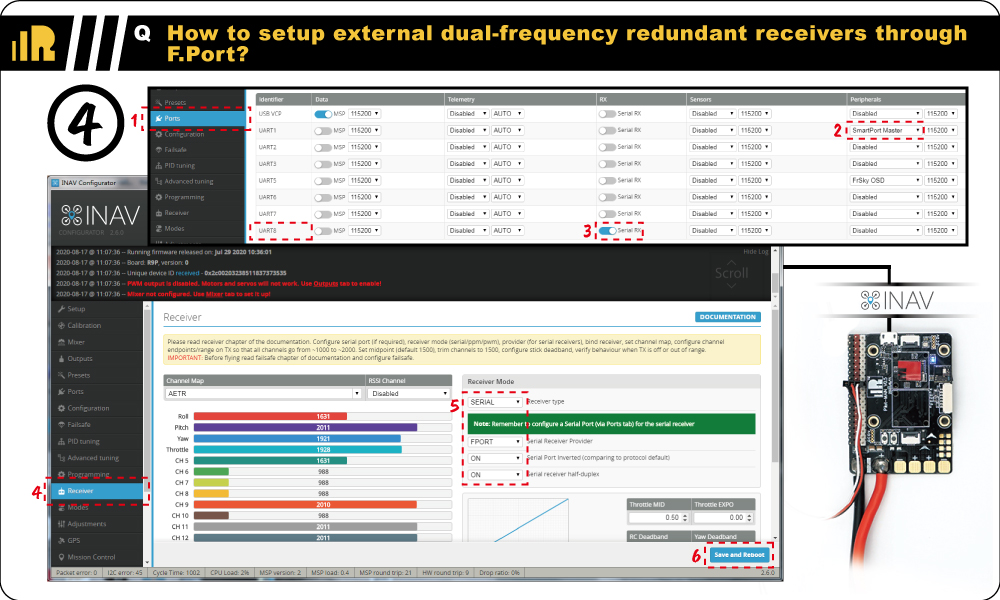
Q: How to setup external dual-frequency redundant receivers through F.Port?

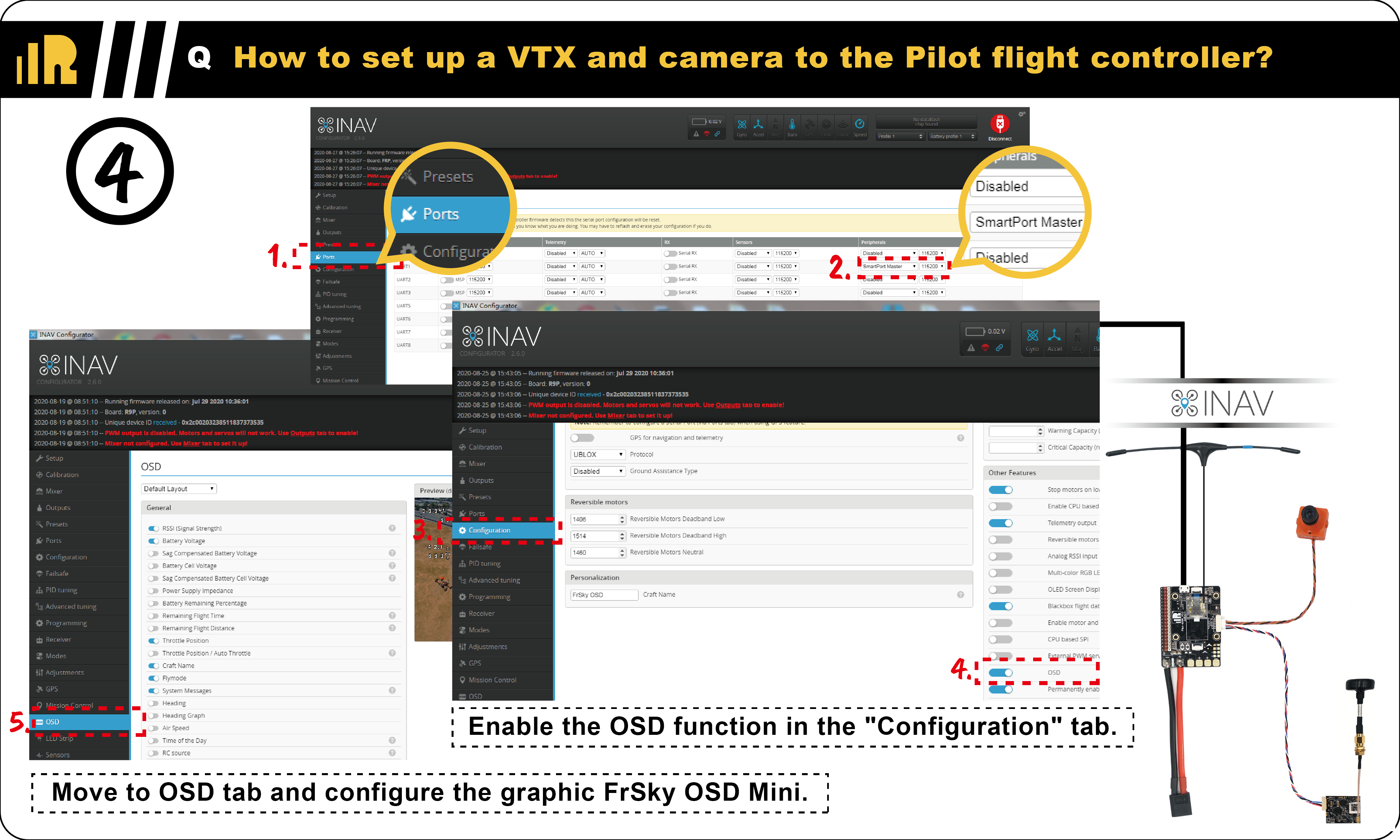
Q: How to setup a VTX and camera to the Pilot flight controller?